Når sjøen beveger seg, stiger kroklasten over den statiske vekten.
I virkelige kranløft skyldes DAF som regel relativ bevegelse. Kranspissen, kroken, wiren, stroppene og nyttelasten beveger seg ikke alltid samlet. Når systemet plutselig tar opp denne bevegelsen, oppfører wiren og riggingen seg som fjærer, og hastighetsforskjellen blir til en strekktopp.
Dekkløft fra forsyningsfartøy. En lastecontainer på et forsyningsfartøy følger fartøyets hiv og rull, mens kranspissen følger kranfartøyet eller plattformen. Hvis kroken beveger seg oppover mens dekket eller containeren beveger seg nedover, kan stroppen gå fra slakk eller lav strekk til fullt belastet i løpet av et brøkdels sekund. Denne rykklasten kan bli langt høyere enn den statiske containervekten.
Splash zone-kryssing. Under en splash zone-kryssing endrer oppdrift, drag, tilleggsmasse og bølgepartikkelhastighet seg raskt idet nyttelasten passerer gjennom den frie overflaten. Kroklasten kan stige og synke raskt, særlig når dynamikken i kran, wire og nyttelast sammenfaller med bølgeperioden.
Andre vanlige utløsende faktorer er brå avløfting fra dekk, landingsstøt, fasthekting, rask kranbevegelse, nødstopp og resonans i kran-wire-last-systemet.
Rykklaster — DAF i verste fall
De mest voldsomme DAF-hendelsene er rykklaster: stroppen blir slakk og strammes så plutselig opp igjen. Mens wiren er slakk beveger kroken og nyttelasten seg uavhengig av hverandre, og når den strammes opp må hastighetsforskjellen absorberes av wirens tøyning nesten momentant. For en nyttelast med masse m (pluss tilleggsmasse mA hvis nedsenket) i en rigg med stivhet k, er strekktoppen over den kvasistatiske lasten omtrent
F_{\text{snap}} = v_{\text{rel}} \sqrt{k \, (m + m_A)}hvor vrel er den relative hastigheten i det øyeblikket wiren strammes opp igjen. Begge designgrepene er synlige i formelen: reduser hastighetsforskjellen (lavere kranhastighet, systemer for hivkompensering, bedre vær) eller reduser den effektive stivheten k (en POLARIS kranstøtdemper). Stiv rigging er fienden her — en dobling av k øker rykkraften med 41% ved samme hastighetsforskjell. DNV-RP-N103 setter kriteriene for når rykklaster må vurderes og hvordan toppen beregnes; det praktiske tiltaket standarden peker på er å holde wiren i strekk gjennom hele bølgesyklusen, som er nøyaktig det en passiv hivkompensator gjør.

Hvordan redusere DAF
- Støtdempere for rykklaster. En POLARIS kranstøtdemper legger til slaglengde og demping mellom kranen og nyttelasten. Den absorberer den kinetiske energien fra en enkelt støthendelse — avløfting fra dekk, en rykklast, en overlast — før den blir til maksimal kranlast. Den trenger tid til å tilbakestille seg etter en hendelse, så ved gjentatte slakk–rykk-sykluser i bølgesonen bør hivkompensering brukes i stedet.
- Passiv hivkompensering for splash zone-kryssinger. En passiv hivkompensator reduserer relativ bevegelse mellom krankroken og subsea-nyttelasten. Dette holder riggstrekket jevnere gjennom splash zone og reduserer den dynamiske forsterkningen kranen opplever.
- Velg kompensator etter operasjon. RIGEL og CYGNUS dekker enklere passive tilfeller, mens ANTARES brukes til kompliserte eller flertrinns subsea-løft med skiftende oppdrift.
- Kontroller løftet så vel som utstyret. Reduser kranhastigheten, unngå resonante sjøtilstander, planlegg værvinduer og bruk skånsomme prosedyrer for avløfting. Utstyret reduserer DAF, men operasjonen setter fremdeles utgangsbetingelsene.
For produktvalg, start med valgveiledningen for hivkompensator eller sammenlign kranbehovet i kranlastdiagrammet.
Det enkleste DAF-anslaget kommer fra DNV-OS-H205 (nå DNV-ST-N001), som gir:
hvor aheave er den maksimale vertikale akselerasjonen ved kranspissen, og g er tyngdeakselerasjonen (9.81 m/s²). For en sinusformet hivbevegelse med amplitude ζ og periode T:
For eksempel, med en hivamplitude på 1.5 m og en periode på 8 s:
Dette er kun DAF ved kranspissen — DAF ved kroken er vanligvis høyere fordi stroppen og nyttelasten danner et fjær-masse-system som forsterker kranspissbevegelsen, særlig nær resonans.

Mer nøyaktige DAF-beregninger krever modellering av hele det dynamiske systemet: kranbommens stivhet, wirens elastisitet, skivefriksjon, stroppoppsett og nyttelastens hydrodynamiske egenskaper. Verktøy som OrcaFlex brukes ofte til dette.
Typiske DAF-verdier
| Løftescenario | Ukompensert | Med kompensering | Hovedårsak |
|---|---|---|---|
| Generelt offshore løft | 1.2 – 2.5 | 1.05 – 1.3 | hiv ved kranspiss og riggstivhet |
| Subsea-løft | beregnet | beregnet — kompensatoren reduserer resultatet direkte | ST-N001 Section 16.17 med RP-N103 — ingen fast minimumsverdi; strekk i løftelinene ≥ 10% av statisk verdi |
| Rykk / avløfting (verste fall) | opptil ~3.2× (illustrativt) | ~1.28× (støtdemper) | slakk-så-rykk i wiren |
DAF etter løftescenario
Offshore faller DAF i to kategorier — et gjentakende hivproblem knyttet til bølgesyklusen, og en enkelt støt- eller rykkhendelse — og hver av dem har sitt eget svar.
Kryssing av vannoverflaten
Ved inngang i splash zone treffer slamming, varierende oppdrift og rykklaster nesten samtidig. Passiv hivkompensering holder stroppen stram og kutter den kranbevegelsesrelaterte delen av DAF; selve slammingen idet lasten treffer vannoverflaten, forblir en hydrodynamisk (DNV-RP-N103) kontroll.
Drivere: slamming · varierende oppdrift · hiv ved kranspiss
Nedfiring av pel eller tung struktur
Ved nedfiring av en lang pel eller et tungt objekt i høy hastighet er det en slakk-så-rykk- eller sjokkhendelse ved kranspissen som driver toppen — en skarp topp av kort varighet, snarere enn et hiv knyttet til bølgesyklusen.
Drivere: rykk-/sjokklast · nedfiringshastighet · riggstivhet
Se DAF, før løftet
Reelle CONSTELLATION-kjøringer for de to scenarioene — strekk- og lastkurvene som viser DAF og hvordan utstyret holder den i sjakk.

Splash zone · RIGEL. Strekk i stroppgruppen holdt hele veien gjennom vannoverflaten — uten slakk, uten rykk. Nyttelast-DAF 1.10.
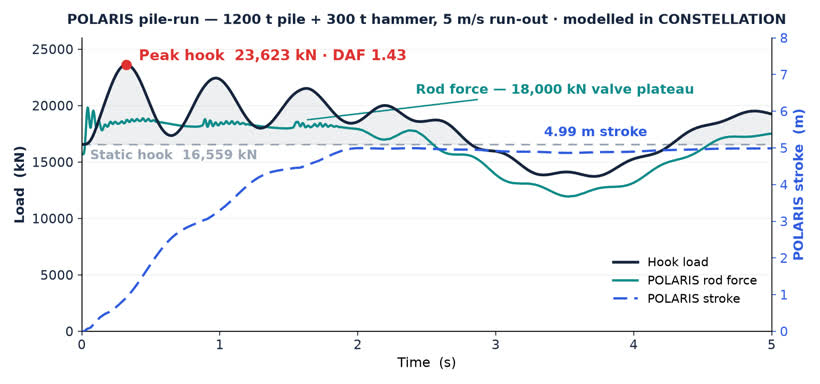
Pile run · POLARIS. Maksimal last ved kranspissen med og uten støtdemper — toppen begrenset under pile run.
Anslå din DAF
Hiv ved kranspiss ζ ≈ 1.0 m; riggforsterkning ≈ 3.5×. Førstegangsanslag for DAF ved kroken — det fanger opp kranspissbevegelse og riggresonans (DAF-en topper seg når bølgeperioden sammenfaller med riggens egenperiode Tn), men ikke tilleggsmasse, drag eller slamming i splash zone, så en rykklasttopp kan bli enda høyere. For designverdien for DAF, bestill en CONSTELLATION-studie.