海が動くと、フック荷重は静的荷重を上回ります。
実際のクレーン揚重では、DAFは通常、相対運動によって生じます。クレーン先端、フック、ワイヤ、スリング、吊り荷がすべて同時に動くわけではありません。システムがこの運動を急に受け止めると、ワイヤとリギングはばねのように作用し、速度差が張力の急増となります。
補給船デッキでの揚重。 補給船上の貨物コンテナは船体のヒーブとロールに追従する一方、クレーン先端はクレーン船またはプラットフォームに追従します。デッキまたはコンテナが下降する際にフックが上昇すると、スリングは一瞬のうちにたるみまたは低張力から全荷重状態へ移行します。このスナップ荷重は、コンテナの静的荷重を大きく上回ることがあります。
飛沫帯通過。 飛沫帯通過では、吊り荷が自由表面を通過する際に、浮力、抗力、付加質量、波の粒子速度が急速に変化します。特にクレーン、ワイヤ、吊り荷の動特性が波周期と一致する場合、フック荷重は急激に上下します。
その他の一般的な要因 には、デッキからの急な地切り、着地衝撃、引っ掛かり、急速なクレーン動作、緊急停止、およびクレーン・ワイヤ・吊り荷システムの共振があります。
スナップ荷重――最悪ケースのDAF
最も激しいDAF事象はスナップ荷重です。スリングがたるみ、その後急に再緊張します。ワイヤがたるんでいる間はフックと吊り荷が独立して動き、張った瞬間に速度差をほぼ瞬時にワイヤの伸びで吸収しなければなりません。質量mの吊り荷(水中の場合は付加質量mA を加算)を剛性kのリギングで吊る場合、準静的荷重を超える張力スパイクは概ね次式となります。
F_{\text{snap}} = v_{\text{rel}} \sqrt{k \, (m + m_A)}ここでvrel はワイヤが再緊張する瞬間の相対速度です。この式には二つの設計上の対策が示されています。速度差を低減する(クレーン動作を遅くする、 ヒーブ補償システム、より良い気象条件)か、有効剛性kを低減する( POLARIS クレーンショックアブソーバー)。ここでは剛性の高いリギングが不利です。kを二倍にすると、同じ速度差でスナップ力は41%増加します。 DNV-RP-N103 は、スナップ荷重を評価すべき条件とピークの計算方法を定めています。そこで示される実務上の対策は、波周期全体を通じてワイヤの張力を維持することであり、これは パッシブヒーブ補償装置 が行うことそのものです。

DAFの低減方法
- スナップ荷重用ショックアブソーバー。 A POLARIS クレーンショックアブソーバー は、クレーンと吊り荷の間にストロークと減衰を付加します。デッキ地切り、スナップ荷重、過負荷といった単発の衝撃事象の運動エネルギーを、クレーン荷重のピークになる前に吸収します。事象後にはリセット時間が必要なため、波浪帯で繰り返すたるみ―スナップサイクルには、代わりにヒーブ補償を使用してください。
- 飛沫帯通過のためのパッシブヒーブ補償。 A パッシブヒーブ補償装置 は、クレーンフックと海中吊り荷の相対運動を低減します。これにより飛沫帯通過中のリギング張力をより滑らかに保ち、クレーンにかかる動的増幅を低減します。
- 作業に応じて補償装置を選定。 RIGELとCYGNUSはより単純なパッシブ用途に対応し、ANTARESは浮力が変化する複雑または複数段階の海中揚重に使用されます。
- 機器だけでなく揚重作業も管理。 クレーン速度を下げ、共振する海象を避け、ウェザーウィンドウを計画し、穏やかな地切り手順を用いてください。機器はDAFを低減しますが、作業条件が依然として出発点を決めます。
製品選定は、 ヒーブ補償装置選定ガイド または クレーン定格荷重表。
最も簡易なDAF推定はDNV-OS-H205(現DNV-ST-N001)によるもので、次式です:
ここでaheave はクレーン先端における最大鉛直加速度、gは重力加速度(9.81 m/s²)です。振幅ζ、周期Tの正弦波ヒーブ運動では:
例えば、ヒーブ振幅1.5 m、周期8 sの場合:
これはクレーン先端のDAFのみです。スリングと吊り荷が、特に共振付近でクレーン先端の運動を増幅するばね―質量系を形成するため、フックDAFは通常より高くなります。

より正確なDAF計算には、クレーンブーム剛性、ワイヤロープの弾性、シーブ摩擦、スリング配置、吊り荷の流体力学的特性を含む動的システム全体のモデル化が必要です。 OrcaFlex などのツールが一般に用いられます。
代表的なDAF範囲
| 揚重シナリオ | 補償なし | 補償あり | 主な要因 |
|---|---|---|---|
| 一般的な洋上揚重 | 1.2 – 2.5 | 1.05 – 1.3 | クレーン先端ヒーブとリギング剛性 |
| 海中揚重 | 算出値 | 算出値――補償装置によって直接低減 | ST-N001 Section 16.17に従いRP-N103を使用――一律の最小値なし;ライン張力は静的張力の≥ 10% |
| スナップ/地切り(最悪ケース) | 最大~3.2× (例示) | ~1.28× (ショックアブソーバー) | ワイヤのたるみ後スナップ |
揚重シナリオ別DAF
洋上では、DAFは繰り返す波周期のヒーブ問題と単発の衝撃またはスナップ事象という二つの対策領域に分かれ、それぞれに異なる解決策があります。
水面通過
飛沫帯に入ると、スラミング、変動する浮力、スナップ荷重がほぼ同時に作用します。パッシブヒーブ補償はスリングを張った状態に保ち、DAFのうちクレーン運動による部分を低減します。入水時のスラミング自体は流体力学的な(DNV-RP-N103)検証対象です。
要因:スラミング · 変動浮力 · クレーン先端ヒーブ
パイルまたは重量構造物の施工
長いパイルまたは重量物を高速で下降させる場合、クレーン先端でのたるみ後スナップまたは衝撃事象がピークを生じさせます。これは波周期ヒーブではなく、鋭く短時間のスパイクです。
要因:スナップ/衝撃荷重 · 下降速度 · リギング剛性
揚重前にDAFを確認
二つのシナリオにおける実際のCONSTELLATION実行結果です。張力・荷重トレースで、DAFと機器による抑制効果を示します。

飛沫帯 · RIGEL。 入水中もスリング群の張力を保持――たるみなし、スナップなし。吊り荷DAF 1.10。
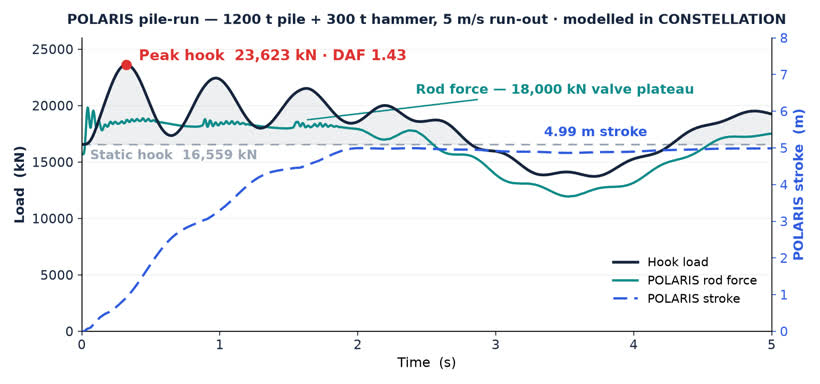
パイルラン · POLARIS。 ショックアブソーバーの有無によるクレーン先端最大荷重――施工中のスパイクを抑制。
DAFを推定
クレーン先端ヒーブ ζ ≈ 1.0 m;リギング増幅 ≈ 3.5×。 初期 フックDAF — クレーン先端運動とリギング共振(波周期がリギングの固有周期Tn)を捉えますが、飛沫帯での付加質量、抗力、スラミングは含まれないため、スナップ荷重ピークはさらに高くなる場合があります。設計基準DAFについては、 CONSTELLATION調査をご依頼ください。